|
rbmatlab
1.16.09
|
|
rbmatlab
1.16.09
|
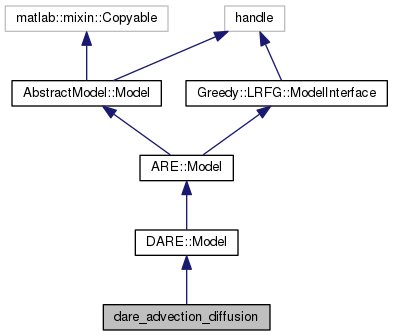
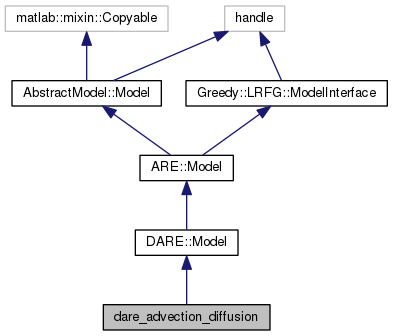
Implicit Euler discretization of a finite-difference convection-diffusion model.
This model is constructed in such a way, that it can follow a given trajectory - or at least it tries to follow it. Use the SIMULATE function to simulate!
Andreas Schmidt, 2016
Definition at line 17 of file dare_advection_diffusion.m.
Public Member Functions | |
| dare_advection_diffusion (n) | |
| function r = | E_comp () |
| function r = | E_coeff () |
| function r = | A_comp () |
| function r = | A_coeff () |
| function r = | B_comp () |
| function r = | B_coeff () |
| function r = | C () |
| function r = | C_comp () |
| function r = | C_coeff () |
| function r = | R_coeff () |
| function s = | get_ss (model_data, dsim) |
| GET_SS Get the state space model for simulation purpose If dsim is provided, a closed-loop simulation is performed. More... | |
| function [
t , y , u , r , x ] = | simulate (model_data, T, r, sim, x0) |
| SIMULATE - Simulate the system for a given time T ...... final time r ...... reference value or vector sim .... simulation used for feedback. More... | |
 Public Member Functions inherited from DARE.Model Public Member Functions inherited from DARE.Model | |
| function pt = | problem_type () |
| function g = | gamma (ModelData model_data, dsim) |
| function n = | closed_loop_norm (ModelData model_data, dsim) |
| CLOSED_LOOP_NORM Implementation of an efficient algorithm for the approximation of the 2-norm of the closed-loop matrix. More... | |
| function [
stable , cleig ] = | closed_loop_stable (ModelData model_data, dsim) |
| CLOSED_LOOP_STABLE Implementation of an efficient algorithm for checking whether the closed loop matrix gives a stable system. This is done by calculting the maximum eigenvalue of the closed loop system. More... | |
| Public Member Functions inherited from ARE.Model | |
|
virtual function [ A , A , B ] = | B_comp (ModelData model_data, this,ModelData model_data) |
| function [
E , A , B , C , Q , R ] = | assemble (md) |
| ASSEMBLE Assembles all the data matrices. This function works for both, the reduced and the full model. More... | |
| function E = | mass_matrix (md) |
| MASS_MATRIX Get the mass matrix of the problem This function is used by the LRFG algorithm for the orthogonalization procedure. More... | |
| function g = | gamma (ModelData model_data, dsim) |
| GAMMA Calculate the value of gamma. This is used by applying the Lyapunov equation method. More... | |
| function R = | R_coeff () |
| function Q = | Q_coeff () |
| function E = | E_coeff () |
| function C = | C_coeff () |
| function B = | B_coeff () |
| function R = | R_comp (ModelData model_data) |
| function Q = | Q_comp (ModelData model_data) |
| function E = | E_comp (ModelData model_data) |
| function C = | C_comp (ModelData model_data) |
| function [
T , y , x ] = | simulate (ModelData model_data, dsim) |
| SIMULATE This function simulates the underlying LTI model If you provide dsim, the closed-loop simulation will be performed. More... | |
| Public Member Functions inherited from AbstractModel.Model | |
| virtual function dsim = | detailed_simulation (ModelData model_data) |
| DETAILED_SIMULATION The function DETAILED_SIMULATION returns an instance of SimData and. More... | |
| virtual function rsim = | rb_simulation (IReducedData reduced_data) |
| REDUCED_SIMULATION This function should return a reduced simulation of type RBSimData. More... | |
| function ModelData model_data = | gen_model_data () |
| GEN_MODEL_DATA Use this function in order to create a class of type ModelData which contains all the large-scale model data such as the discretized operators. More... | |
| function IDetailedData detailed_data = | gen_detailed_data (ModelData model_data) |
| GEN_DETAILED_DATA Call the basis generation algorithm. More... | |
| function IReducedData reduced_data = | gen_reduced_data (IDetailedData detailed_data) |
| GEN_REDUCED_DATA Get the reduced data structures. More... | |
| function pt = | problem_type () |
| PROBLEM_TYPE Use this function to determine the problem type. So consider overwriting it if necessary! TODO: implement a smart interface that automatically generates the correct. More... | |
| function mu = | get_mu () |
| Get the parameter values. More... | |
| function this = | set_mu (mu) |
| Set the parameter values. More... | |
Public Attributes | |
| mu = "[1 1 3]" | |
| mu_names = {"'mu_diffusion', 'mu_adv_y', 'lambda_tracking'"} | |
| mu_ranges = {" [0.1, 2], [0,10], [1, 10]"} | |
| n0 | |
| dt = 0.05 | |
| Public Attributes inherited from DARE.Model | |
| RB_closed_loop_norm = "fro" | |
| RB_closed_loop_stable = false | |
| Public Attributes inherited from ARE.Model | |
| enable_error_estimator = false | |
| calc_residual = true | |
| RB_gamma_mode = "Kernel" | |
| Additional fields for basis generation: More... | |
| RB_gamma_enabled = 1 | |
| RB_gamma_settings = {""} | |
| p | |
| The number of measurement outputs. | |
| m | |
| The number of control inputs and measurements. | |
| n | |
| model_data | |
| Public Attributes inherited from AbstractModel.Model | |
| mu | |
| mu_names | |
| mu_ranges | |
| Public Attributes inherited from Greedy.LRFG.ModelInterface | |
| RB_greedy_tolerance = 1e-4 | |
| RB_orthonormalize_E = true | |
| RB_error_indicator = "residual" | |
| RB_pod_tolerance = 0.99 | |
| RB_pod_max_extension = 10 | |
| RB_M_train = "Uniform" | |
Protected Member Functions | |
|
function [
A , name ] = | my_2d_matrix (n0, fx_str, fy_str, g_str, mu_str) |
| function v = | my_2d_vector (n0, f_str) |
| function s = dare_advection_diffusion.get_ss | ( | model_data, | |
| dsim | |||
| ) |
GET_SS Get the state space model for simulation purpose If dsim is provided, a closed-loop simulation is performed.
| model_data | model data |
| dsim | dsim |
| s | s |
Definition at line 113 of file dare_advection_diffusion.m.


| function [ t , y , u , r , x ] = dare_advection_diffusion.simulate | ( | model_data, | |
| T, | |||
| r, | |||
| sim, | |||
| x0 | |||
| ) |
SIMULATE - Simulate the system for a given time T ...... final time r ...... reference value or vector sim .... simulation used for feedback.
| model_data | model data |
| T | T |
| r | r |
| sim | sim |
| x0 | x0 |
| t | t |
| y | y |
| u | u |
| r | r |
| x | x |
Definition at line 142 of file dare_advection_diffusion.m.

 1.8.8
1.8.8

