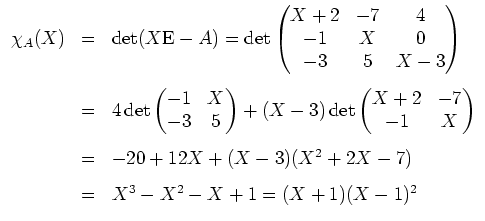
Zunächst berechnen wir das charakteristische Polynom
Also hat
 die Eigenwerte
die Eigenwerte
 und
und
 . Wir berechnen nun die Jordanform von
mit einer Transformationsmatrix
. Wir berechnen nun die Jordanform von
mit einer Transformationsmatrix
 .
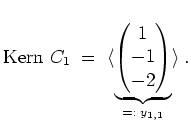
Für den Eigenwert
setzen wir
.
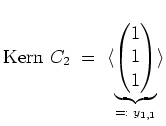
Für den Eigenwert
setzen wir
 und erhalten sofort
Dies ist eine Basis des Hauptraums
und erhalten sofort
Dies ist eine Basis des Hauptraums
 , also wählen wir
, also wählen wir
 .
.
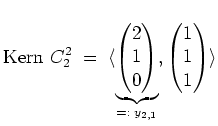
Für den Eigenwert
setzen wir
 und berechnen
sowie
woraus wir eine Basis
und berechnen
sowie
woraus wir eine Basis
 des Hauptraums
des Hauptraums
 erhalten.
erhalten.
Wir ersetzen nun im nächsten Schritt diese Basis durch die einzige hier erforderliche Kette
 , welche ebenfalls eine Basis des Hauptraums
darstellt.
(Daß
, welche ebenfalls eine Basis des Hauptraums
darstellt.
(Daß
 ist, darf als Zufall angesehen werden.) Insgesamt erhalten wir
ist, darf als Zufall angesehen werden.) Insgesamt erhalten wir
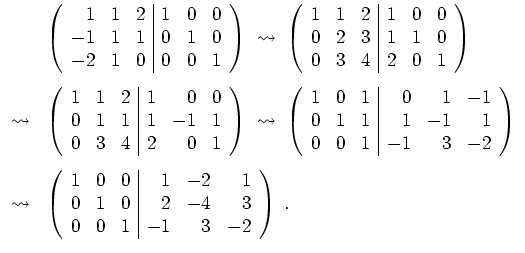
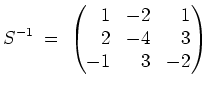
und es ist
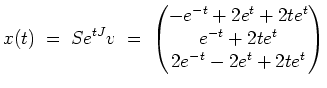
Dann ist also
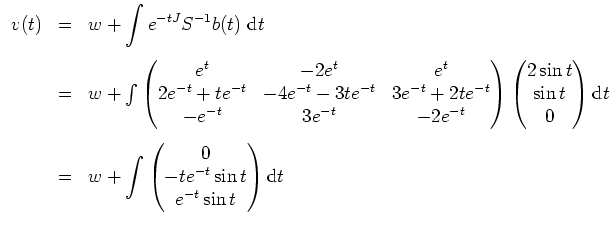
eine Fundamentalmatrix, so daß die allgemeine Lösung der Differentialgleichung die Gestalt
hat, mit einem Vektor
 .
.